
ZNBC-50智能編程控溫儀
498
產品摘要
- 南北儀器是ZNBC-50智能編程控溫儀產品的供應商,提供ZNBC-50智能編程控溫儀全套產品的價格,參數,價錢,報價,品牌等資料,歡迎來電咨詢優惠價錢,南北儀器品質提供
您好!歡迎訪問南北科儀(北京)科技有限公司
南北科儀(北京)科技有限公司
一、ZNBC-50型智能編程控溫儀的產品特點 智能50段編程控溫儀是采用微電腦控制與熱電阻配套使用的多步序可編程控溫儀,可實現降溫速度控制和恒溫定時控制。多種參數可在面板鍵入,可在線對控制參數進行專家自整定,控溫精度高,適用范圍廣,可用于各種需自動控制溫度的場合。 二、ZNBC-50型智能編程控溫儀的使用方法 1.正常狀態“顯示”窗口(PV)顯示測量溫度。“設定”窗口(SV)顯示設定溫度值。長按“▲”可使儀表在運行狀態和保持狀態之間切換,按“▼”使儀表進入停止狀態。 2.在停止狀態和運行狀態,可根據系統要求編制程序的各步溫度及時間。按“◄”設定移位鍵0.5秒放開,“顯示”窗口(PV)顯示C01,表示“設定”窗(SV)顯示優異步的設定溫度值,此時按加、減鍵,結合移位鍵可修改該步的設定溫度值。再按“SET”鍵0.5秒放開,“顯示”窗口(PV)顯示T01,表示“設定”窗口(SV)所設定優異步的步時間,此時按加、減鍵結合移位健可修改該步的步時間,按設定鍵0.5秒后確認。按”SET”顯示窗口(PV)顯示C02,表示“設定”窗(SV)顯示第二步的溫度值,此時按加、減鍵結合移位鍵可修改第二步的溫度值。再按設定鍵0.5秒后放開,“顯示”窗口(PV)顯示T02,表示“設定”窗口(SV)所設定第二步的步時間。在設置過程中先按“◄”設定移位鍵不放,再按“SET”鍵,可退出設置程序狀態。 3.在運行狀態,儀表從優異步開始運行,直到步時間為0(ST00)的步序時則自動停止運行,“設定”(SV)窗顯示閃動的”STOP”字樣。若各步時間都不為0,則程序循環運行不關機。在運行狀態,每按“SET”健0.5秒后放開,可查看當前運行的程序步序號(如運行到優異段或某一段)、時間設定以及運行時間.其中“顯示”(PV)窗顯示:STEP及設定時間,表示“設定”(SV)窗顯示當前程序步序號及運行時間,結合“▼”、“▲”可修改運行程序段號,以加快程序運行。按“SET”鍵,可退出程序狀態。 4.長按“◄”設定移位鍵3秒可啟動PID自整定功能。自整定時“SV”窗口顯示“AT”字樣,儀表按位式控制運行。自整定結束“AT”無顯示,P、I、D值自動存儲,儀表返回正常狀態。在自整定過程中,若切換儀表進入其他狀態,則自動退出自整定程序。自整定功能可根據加熱時間、功率、過沖上、下限自動記憶,自動改變內部參數,得出一組優異數值。無規律加熱,如加熱功率、干式、濕式、溫區不斷改變等,建議使用原參數。如溫區改變,其他條件不變或做加溫建議使用自整定。自整定需在保溫時使用,其余時間啟用效果不+。如條件變化不大,以后使用可不進行自整定。 三、ZNBC-50型智能編程控溫儀的技術參數 工作電壓:~180-240∨50Hz。 工作時間:≥8小時。 控溫精度:±0.5℃ 分辨率:±0.1℃ 量程:室溫--399℃ 感溫信號:Pt99 控溫方式:可控硅控制輸出 負載輸出:≤1500W 空載功耗:≤5W 環境溫度:0—50℃,無腐蝕氣體 相對濕度:35%-85%(無冷凝) 保險管:ø5×2015A。 四、ZNBC-50型智能編程控溫儀的注意事項 1.當“設定”(SV)窗顯示“oral”時,表示傳感器開路或短路或實際溫度超出儀表測量范圍 2.因受加熱、保溫、散熱等條件影響,儀表控制精度因型號允許有0.5%—2%偏差 3.做腐蝕性液體的測溫時,請將傳感器用玻璃套管套上,以防腐蝕 4.非專業人員請不要打開儀表,內有高壓注意安全 5.請勿過載使用。 6.儀器應有良好的接地。 7.長期不用時,請保持儀器清潔,并放在干燥無腐蝕氣體處保存. 若因產品或此說明書所涉及的產品因改良而至此說明書的內容有異時,恕不另行通知。 五、附(常用參數說明) LOC(軟件鎖) 按SET鍵三秒后,PV框顯示“LOC”,當LOC參數設定為808以外的數值時,儀表只能顯示和設置0-8個用戶開放參數(通過EP1-EP8進行設置) Loc=0允許修改用戶參數,程序值及程序段 Loc=1允許修改用戶參數和程序段,不允許修改程序 Loc=2允許修改用戶參數,不允許修改程序段和程序 Loc=3用戶參數和程序只能查看,不能修改 Loc=808開放參數,都允許修改 設置范圍:0-9999 In(輸入規格)
In 輸入規格 顯示范圍 0 K -50-1300攝氏度 21 Pt99 -200-攝氏度 設置范圍:0-37
Out(控制方式)
Out=0:儀表執行位式控制模式
Out=1:儀表執行PID調節模式,可以面板啟動自整定
Out=2:儀表執行自動整定操作
Out=3:儀表執行PID調節模式,不可以通過面板啟動自整定
Out=4:儀表執行PID調節模式,P參數擴大10倍,適用于更精密的控制場合
設置范圍:0-4
I(積分參數)
I參數與系統的保持特性有關,溫度控制時,系統保溫性能越好,I參數的數值也就越大。I參數調節作用相當于積分作用,其值越小,積分作用越強。I設定為0時,儀表取消積分作用。
設置范圍:0-9999
P(比例參數)
P參數對調節中的比例起作用。P值越大,比例帶越小,調節作用越強,對溫度變化反應快,反之,P值越小,比例帶加大,調節作用減弱,對溫度變化反應慢。
設置范圍:0-9999
d(微分參數)
d參數越小,微分作用越弱,反之微分作用越強。溫度變化快的控制系統,應充分考慮微分作用對控制效果的影響,對熱容量大,溫度變化慢的控制系統,一般微分作用對控制的影響不大。
設置范圍:0-2000
t(輸出周期)
輸出周期為儀表的調節運算周期,單位為秒。它反映儀表運算的快慢。當設定為0時,控制周期為0.5秒。
設置范圍:0-125
P、I、d參數的改變將直接影響控制的效果。所以建議用戶通過自整定來自動分析計算各參數,如果自整定后仍然無法獲得滿意的控制效果,可以參考說明書中關于手動調節PID參數的說明。
PID參數的手動調節
儀表的自整定功能具有較高的準確性,可以滿足大部分用戶的控制要求,但是由于控制對象的復雜性,對于某些場合,自整定出來的參數不一定是合理的參數,所以也可能需要人工根據用戶系統的特性對PID參數進行手動調節以獲得滿意的控制效果。
|
|
現象/調節方法 |
|
1 |
多段電爐(窯爐)控制系統,由于各段之間互相影響,自整定出來的I參數會偏大 |
|
2 |
控制點在設定點上下短周期振蕩(和自整定時的振蕩范圍相似),減小P,加大I和d |
|
3 |
控制點在設定點上下長周期振蕩(數倍自整定時的振蕩),加大I,加大P,d |
|
4 |
沒有振蕩,只是存在靜差,減小I,加大P,如果終能穩定控制,但是時間較長則可減小d,加大P,減小I |
注意:調試時可以采用逐步測試法,即將PID參數之一增加或減小30%-50%,如果控制效果變好,則繼續增加或減少該參數,否則往反方向調整,直到滿足控制要求,一般調整順序為I,P,d以及t參數。
儀表的編程說明
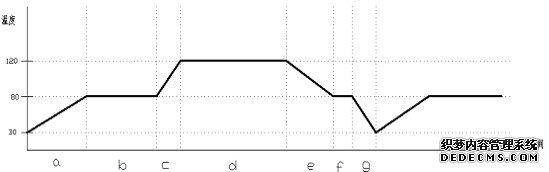
儀表具有五十段工藝曲線控制功能,可以根據工藝曲線設置升溫斜率以及降溫斜率,恒溫時間等。如某產品工藝曲線要求如下:
|
工藝要求 |
||||||
|
段號 |
起始溫度 |
終止溫度 |
升溫速率 |
對應時間 |
動作要求 |
|
|
a |
30 |
80 |
1度/分鐘 |
50分鐘 |
到達80度報警1吸合 |
升溫段 |
|
b |
80 |
80 |
|
60分鐘 |
恒溫段結束報警1釋放 |
恒溫段 |
|
c |
80 |
120 |
2度/分鐘 |
20分鐘 |
到達120度報警2吸合 |
升溫段 |
|
d |
120 |
120 |
|
90分鐘 |
恒溫段結束報警2釋放 |
恒溫段 |
|
e |
120 |
80 |
1度/分鐘 |
40分鐘 |
|
降溫段 |
|
f |
暫停,等待操作人員處理 |
暫停等待 |
||||
|
g |
重新執行工藝曲線流程 |
跳轉/準備 |
||||
|
工藝要求 |
曲線設置 |
|
優異步:由30度按照1度/分鐘升到80度(升溫時間:50分鐘) |
c01:30t01:50 |
|
第二步:達到80度報警1吸合,順序執行第三步 |
c02:80t02:-33 |
|
第三步:80度恒溫60分鐘 |
c03:80t03:60 |
|
第四步:恒溫段結束報警1釋放,順序執行第五步 |
c04:80t04:-155 |
|
第五步:由80度按照2度/分鐘升到120度(升溫時間:20分鐘) |
c05:80t05:20 |
|
第六步:達到120度報警2吸合,順序執行第七步 |
c06:120t06:-67 |
|
第七步:120度恒溫90分鐘 |
c07:120t07:90 |
|
第八步:恒溫段結束,報警2釋放,順序執行第九步 |
c08:120t08:-189 |
|
第九步:由120度降溫到80度,降溫速率1度/分鐘(降溫時間:40分鐘) |
c09:120t09:40 |
|
第十步:儀表暫停等待狀態,等待操作人員處理 |
c010:80t10:0 |
|
第十一步:程序重新從優異段執行 |
c011:80t11:-1 |
注明:時間參數的設定:當時間設置為1-9999之間時,表示運行的時間;當時間設置為0時,程序運行到此段執行暫停操作;當時間設置為-1至-240時,表示一個控制命令;當時間設定為-241時,報警1輸出一個0.5秒的脈沖動作,程序繼續執行下一段。
當時間設定為負數時表示一個控制命令,其計算方法如下:
txx=-(A×30+B)
B的設定范圍為:1-30,表示對應跳轉的程序段號
A的設定范圍為:0-7,其含義如下
|
A |
控制輸出 |
|
0 |
只執行程序跳轉 |
|
1 |
接通報警1 |
|
2 |
接通報警2 |
|
3 |
同時接通報警1和2 |
|
4 |
執行停止操作,B恒定為1 |
|
5 |
關閉報警1 |
|
6 |
關閉報警2 |
|
7 |
同時關閉報警1和2 |
例如:程序第三段定義為跳轉到第四段,打開報警1
t03=-(1×30+4)=-34
如果程序運行到第10段需要停止,則設定為:
t10=-(4×30+1)=-121




